
Gyakorlat 2.
B.Sc course, University of Debrecen, Department of Data Science and Visualization, 2024
Ismétlés
class Problem:
"""A formális problémát leíró absztrakt osztálya.
Az __init__, goal_test és path_cost metódusok adott esetben felülírhatók.
A létrehozzott alosztály példányai, megoldhatók a különféle keresési funkciókkal."""
def __init__(self, initial, goal=None):
"""Konstruktor. Szükség esetén további tulajdonságokkal bővíthető"""
# kezdő állapot
self.initial = initial
# cél állapot
self.goal = goal
def actions(self, state):
"""Az adott állapotban végrehajtható műveletek visszaadásár szolgáló metódus.
Az eredmény általában egy lista, de ha sok művelet van, akkor célszerű lehet
iterátor alkalmazás a teljes lista vissza adása helyett."""
raise NotImplementedError
def result(self, state, action):
"""Azt az állapotot adja vissza, amely az adott művelet adott állapotban
történő végrehajtásából adódik.A cselekvésnek a self.actions(state) egyikének kell lennie."""
raise NotImplementedError
def goal_test(self, state):
"""Igaz értékkel tér vissza, ha az adott állapot egy cél állapot.
Az alapértelmezett metódus összehasonlítja az állapotot a self.goal-al,
vagy ellenőrzi a self.goal állapotát, ha az egy lista, a konstruktorban megadottak szerint.
A módszer felülírása szükséges lehet, ha nem elegendő egyetlen self.goal összehasonlítása."""
if isinstance(self.goal, list):
for s in self.goal:
if s==state:
return True
return False
else:
return state == self.goal
def path_cost(self, c, state1, action, state2):
"""Egy olyan megoldási útvonal költségét adja vissza.
Ha a probléma olyan, hogy az elérési út nem számít, ez a függvény csak az állapot2-t nézi.
Ha az elérési út számít, figyelembe veszi a c-t, esetleg az állapot1-et és az akciót.
Az alapértelmezetten a költség 1 az elérési út minden lépéséért."""
return c + 1
def value(self, state):
"""Optimalizálási problémák esetén minden állapotnak van értéke.
A hegymászó és más hasonló algoritmusok megpróbálják maximalizálni ezt az értéket."""
raise NotImplementedError
class Node:
"""Csomópont a kereső fában.
Tartalmaz egy mutatót a szülőre (a csomópontra, amelynek ez az utódja) és a
csomópont aktuális állapotára.
Egy állapotot két útvonalon érünk el, akkor két azonos állapotú csomópont van.
Tartalmazza azt a műveletet is, amely ebbe az állapotba juttatott minket,
valamint a csomópont eléréséhez szükséges teljes path_cost (más néven g) értéket.
Más függvények hozzáadhatnak egy f és h értéket;
lásd a best_first_graph_search és az astar_search leírását az
f és h értékek kezelésének magyarázatához."""
def __init__(self, state, parent=None, action=None, path_cost=0):
"""Node osztály konstruktora."""
self.state = state
self.parent = parent
self.action = action
self.path_cost = path_cost
self.depth = 0
if parent:
self.depth = parent.depth + 1
def __repr__(self):
"""Speciális metódus mely az objektum string állapotát definiálja"""
return "<Node {}>".format(self.state)
def __lt__(self, node):
"""Speciálist metódus mely definiálja hogy az adott Node objektum
mikor kisebb e egy másik Node objektumnál"""
return self.state < node.state
def __eq__(self, other):
"""Speciálist metódus mely definiálja hogy az adott Node objektum
mikor egyenlő egy másik Node objektummal"""
return isinstance(other, Node) and self.state == other.state
def __hash__(self):
"""Speciális metódus mely definiálja hogy egy adott Node objektum
hash állapotát definiálja"""
return hash(self.state)
def child_node(self, problem, action):
"""A következő csomópont az adott probléma szerinti elkészítése és visszaadása"""
next_state = problem.result(self.state, action)
next_node = Node(state = next_state,
parent = self,
action = action,
path_cost = problem.path_cost(self.path_cost, self.state, action, next_state))
return next_node
def expand(self, problem):
"""A csomópontból egy lépésben eléhető csomópontok visszadása"""
return [self.child_node(problem, action) for action in problem.actions(self.state)]
def solution(self):
"""A gyökér csomópontól a csompontig terjedő műveletek listájának visszaadása"""
return [node.action for node in self.path()[1:]]
def path(self):
"""A gyökér csomópontól a csompontig vezető utvonal csomópontjainak listája"""
node, path_back = self, []
while node:
path_back.append(node)
node = node.parent
return list(reversed(path_back))
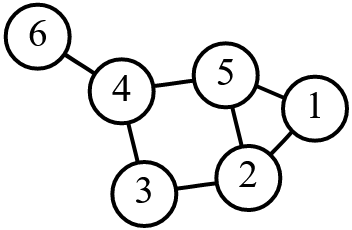
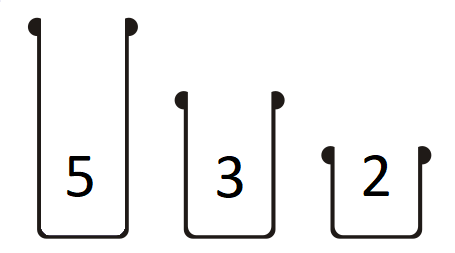
3 Korsó
Gondolkodjunk közösen
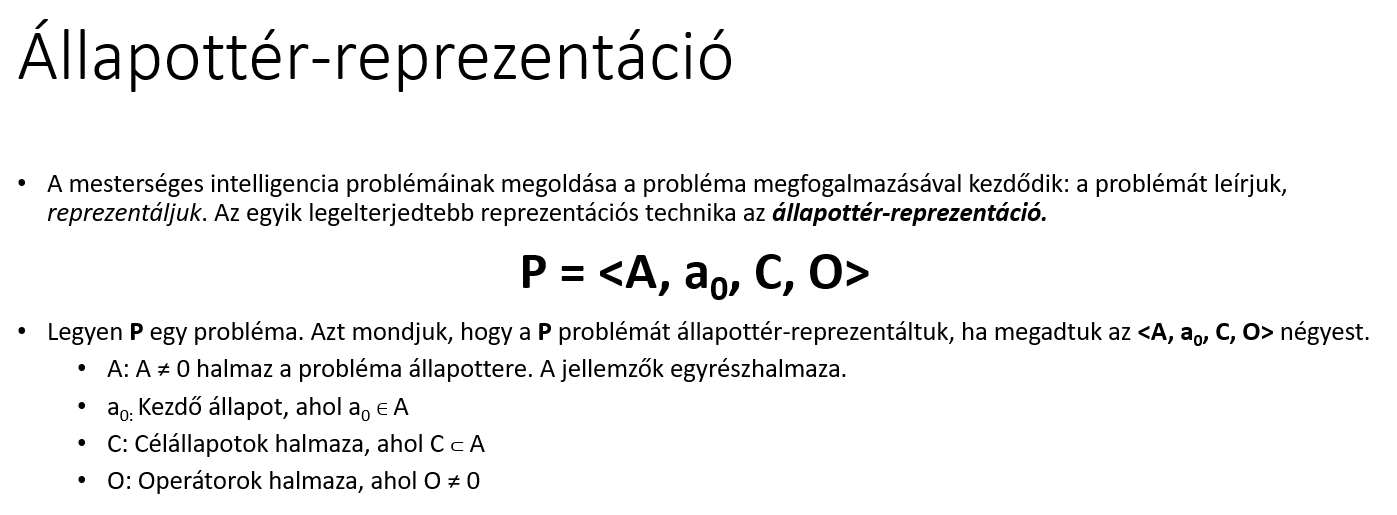
Állapottér reprezntáció
Jellemzők
- H1 = {0, 1, 2, 3, 4, 5},
- H2 = {0, 1, 2, 3},
- H3 = {0, 1, 2}
Állapotok halmaza
- A ⊆ H1xH2xH3
- A = {<a1, a2, a3>, <a1, a2, a3> ∈ H1 x H2 x H3 ∧ a1+a2+a3 = 5}
- 12 lehetséges állapot
Kezdő állapot:
- a0 = <5, 0, 0>
Célállapotok:
- C = {<4, 1, 0> , <4, 0, 1>}
- C = {<a1, a2, a3>, <a1, a2, a3> ∈ A ∧ a1 = 4}
Operátorok:
- O = {o1,2, o1,3, o2,1, o2,3, o3,1, o3,2} = {oi,j , i ∈{1,2,3} ∧ j ∈{1,2,3} ∧ i ≠j}
- Dom(oi,j)={<a1, a2, a3>, <a1, a2, a3> ∈ A ∧ ai > 0 ∧ aj <max(Hj), ahol oi,j ∈ O
- oi,j(<a1, a2, a3>) = (<b1, b2, b3>)
- m = min(ai, max(Hj) – aj)
- bk, ahol k=1,2,3
- ak + m, ha k = j
- ak - m, ha k = i
- ak, egyébként
Programozzunk
class Cup3(Problem):
def actions(self, state):
"""Operátorok definiálása"""
acts = []
five, three, two = state
if five > 0 and three < 3:
acts.append("5-->3")
if five > 0 and two < 2:
acts.append("5-->2")
if three > 0 and five < 5:
acts.append("3-->5")
if three > 0 and two < 2:
acts.append("3-->2")
if two > 0 and five < 5:
acts.append("2-->5")
if two > 0 and three < 3:
acts.append("2-->3")
return acts
def result(self, state, action):
"""Operátorok hatásának definiálása"""
five, three, two = state
if action == "5-->3":
m = min(five, 3-three)
return (five-m, three+m, two)
if action == "5-->2":
m = min(five, 2-two)
return (five-m, three, two+m)
if action == "3-->5":
m = min(three, 5-five)
return (five+m, three-m, two)
if action == "3-->2":
m = min(three, 2-two)
return (five, three-m, two+m)
if action == "2-->5":
m = min(two, 5-five)
return (five+m, three, two-m)
if action == "2-->3":
m = min(two, 3-three)
return (five, three+m, two-m)
c = Cup3((5,0,0), [(4,1,0),(4,0,1)])
Próba-hiba módszer

def trial_error(problem):
"""
Próba hiba módszer
"""
# kezdő állapot
state = Node(problem.initial)
# végtelen ciklus definiálása
while True:
# Ha a probléma megoldva akkor leállítjuk a végtelen ciklust
if problem.goal_test(state.state):
print('Got it')
return state
# Az alkalmazható operátorok segítsével
# gyártsuk le az összes lehetséges utódot
succesors=state.expand(problem)
# Ha nincs új állapot (utód)
if len(succesors)==0:
return 'Unsolvable'
# random választunk egy újat a legyártott utódok közül
state=succesors[np.random.randint(0,len(succesors))]
print(state.state)
print(trial_error(c).solution())
Hegymászó módszer
def hill_climbing(problem, heuristic):
# kezdő állapot
state = Node(problem.initial)
# végtelen ciklus definiálása
while True:
# Ha a probléma megoldva akkor leállítjuk a végtelen ciklust
if problem.goal_test(state.state):
return state
# Az alkalmazható operátorok segítsével
# gyártsuk le az összes lehetséges utódot
succesors=state.expand(problem)
# keresünk egy jobb állapotott a heurisztikának megfelelően
test_succesors=[]
for s_test in succesors:
if heuristic(state.state)>=heuristic(s_test.state):
test_succesors.append(s_test)
# Ha nincs jobb állapot
if len(test_succesors)==0:
return 'Unsolvable'
# ha több azonosan jó van akkor random választunk egyet
state=test_succesors[np.random.randint(0,len(test_succesors))]
print(state.state)
# A heurisztika lényeg az hogy ha minél több üres korsót találunk
# annál távolabb vagyunk a megoldástól
def heuristic_calc_empty_jar(State):
if State==(4,0,1) or State == (4,1,0):
return 0
c=0
for i in State:
if i == 0:
c+=1
return c+1
print(hill_climbing(c, heuristic_calc_empty_jar).solution())
for i in range(10):
print(hill_climbing(c, heuristic_calc_empty_jar).solution())
def heuristic_zero(State):
return 0
print(hill_climbing(c, heuristic_zero).solution())